How To Make A Robot Move In Gazebo
How To Make A Robot Move In Gazebo. Note: There are no interpolate flags for the y or z axes, so make sure your in-place animations move along the x axis. That shows you how to create a robot from scratch and use a plugin to make it follow the closest object, sensed by a depth camera (not a.
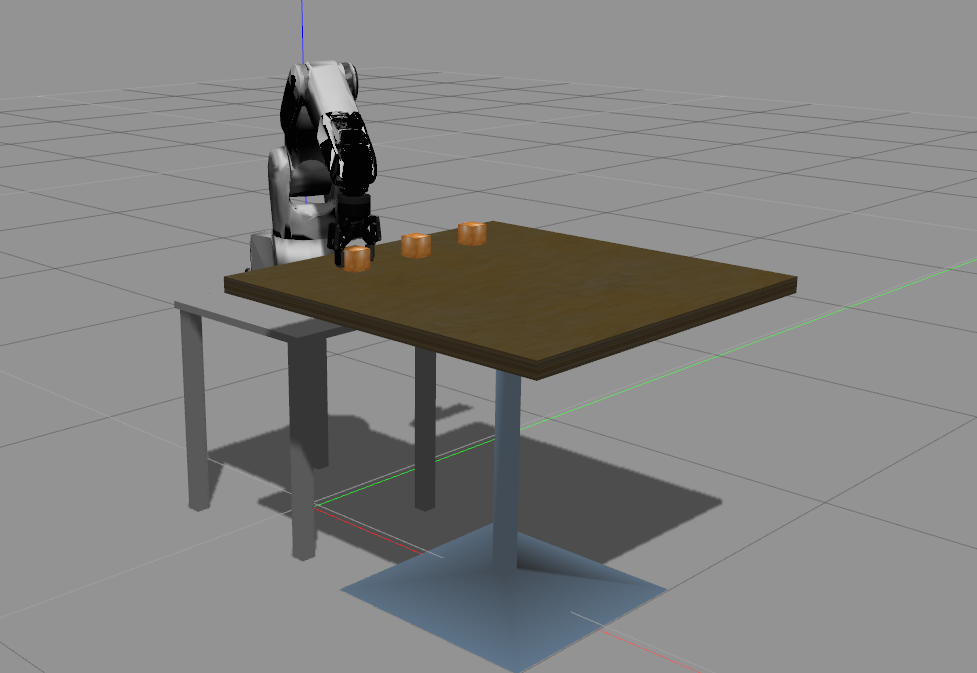
Necessary node's will run and Gazebo screen will appear: You can interact with world by moving objects, adding new ones etc.
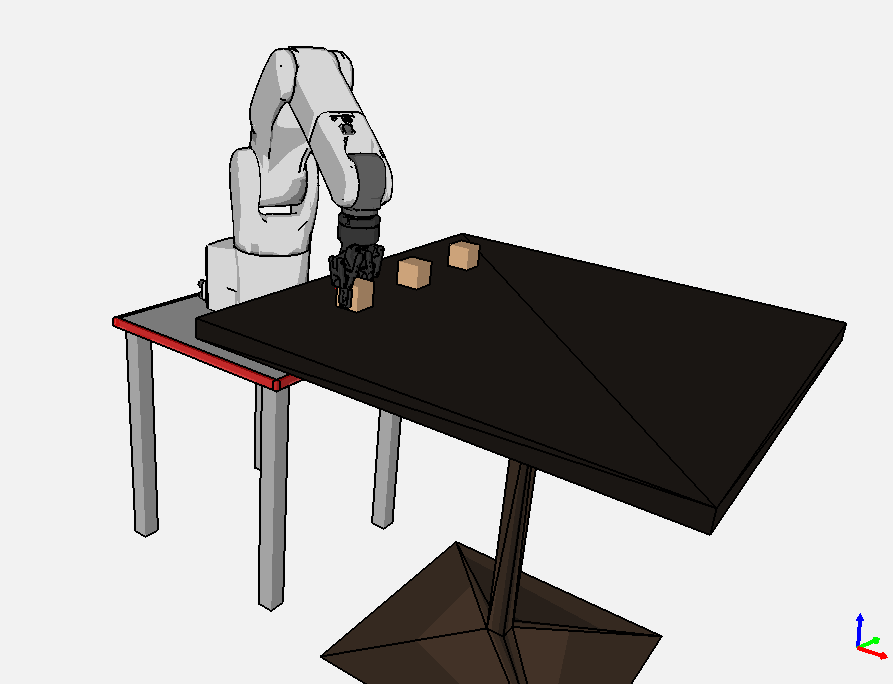
The simulated robot arm is not as well tuned as the real robot.

Gazebo Robot Simulator Makes Version 7

Turtlebot Simulators — Gaitech EDU 2.5 documentation
Robot simulation in Gazebo · osrobotics

Autonomous 2WD Robot - Gazebo Package - fjp.github.io

Robots/TIAGo/Tutorials/motions/cmd_vel - ROS Wiki

Robots/TIAGo/Tutorials/FaceDetection - ROS Wiki
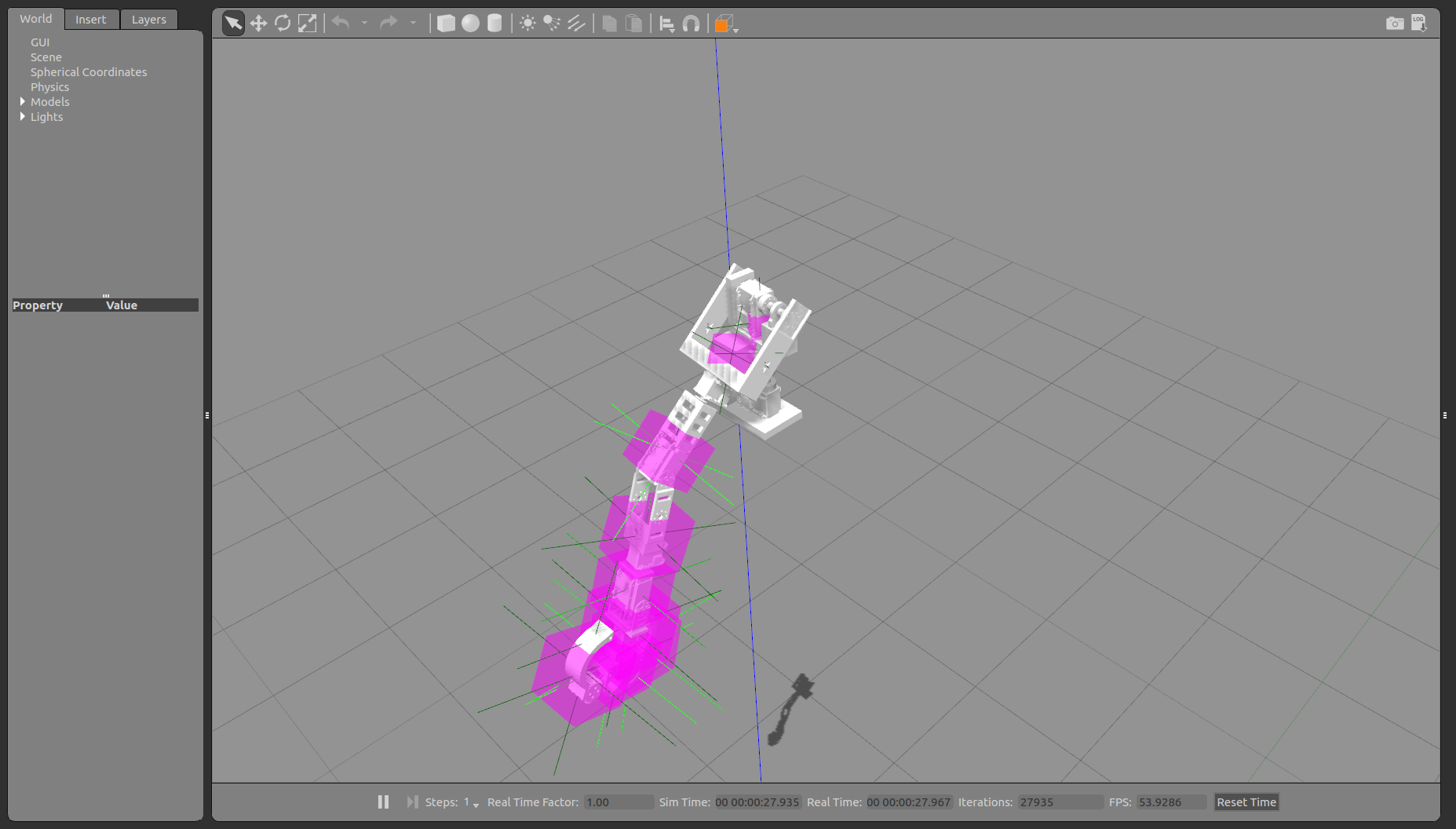
robot arm is broken link by link in gazebo - ROS Answers ...
How to Simulate a Robot Using Gazebo and ROS 2 - Automatic ...

ROS:[Gazebo] Moving Robot and Obtaining Camera Image By ...
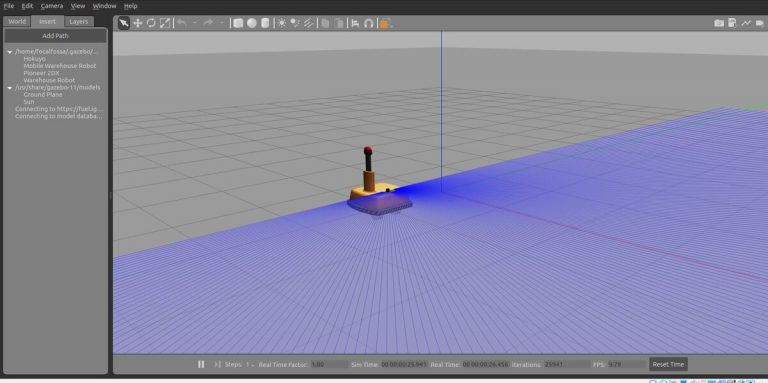
Launching the Gazebo with the robot model Go to the cloned directory and open the terminal (ctrl+alt+t) and run the following commands. cd rover_ws catkin_make source devel/setup.bash roslaunch. Note: There are no interpolate flags for the y or z axes, so make sure your in-place animations move along the x axis. During execution, the robot should move in Gazebo, and an XY Plot updates the pose observed in Simulink.
Fresh How To Make A Robot Move In Gazebo
If you have reached to this point, executing roslaunch <robot>_moveit_config demo_gazebo.launch file will enable you to move your robot. The world of simulating robots in play just got easier with the help of students TJ Watson and Michael Strickland from WPI. You should be seeing the person walking from one side to the other, faster in one direction, and slower the other way. The real arm will not wobble the way the simulated arm does when executing a trajectory.
