How To Make A Line Following Robot Using Raspberry Pi
How To Make A Line Following Robot Using Raspberry Pi. Connect the GND pin of the line sensor to the blue (negative) ground rail of the solderless breadboard. Sign in to (or create) a Raspberry Pi account to save your project progress and come back later.
In my case this is a Raspberry Pi device.
This project will be using a Raspberry Pi processor board for computational purpose and driving of the robot.
Programming Raspberry Pi Robot: Making it Follow the Lines ...

Pizazz Low Cost Robotic Vehicle for Raspberry Pi | 4tronix
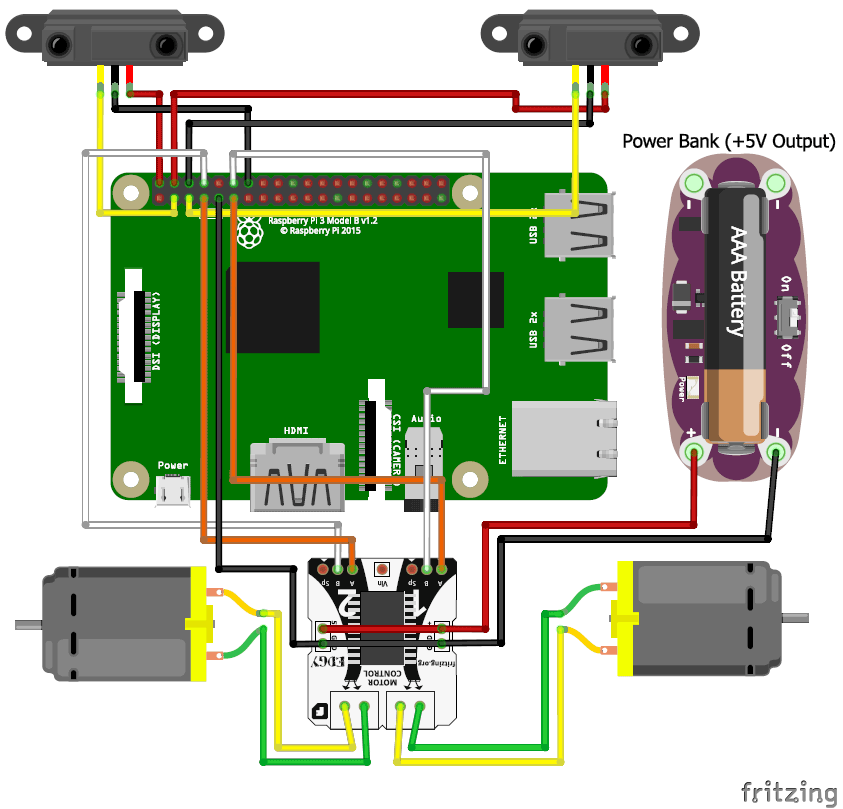
Raspberry pi line follower robot circuit diagram

Circuit diagram of Raspberry Pi Ball tracking Robot using ...

Build Your Internet Controlled Video-Streaming Robot With ...
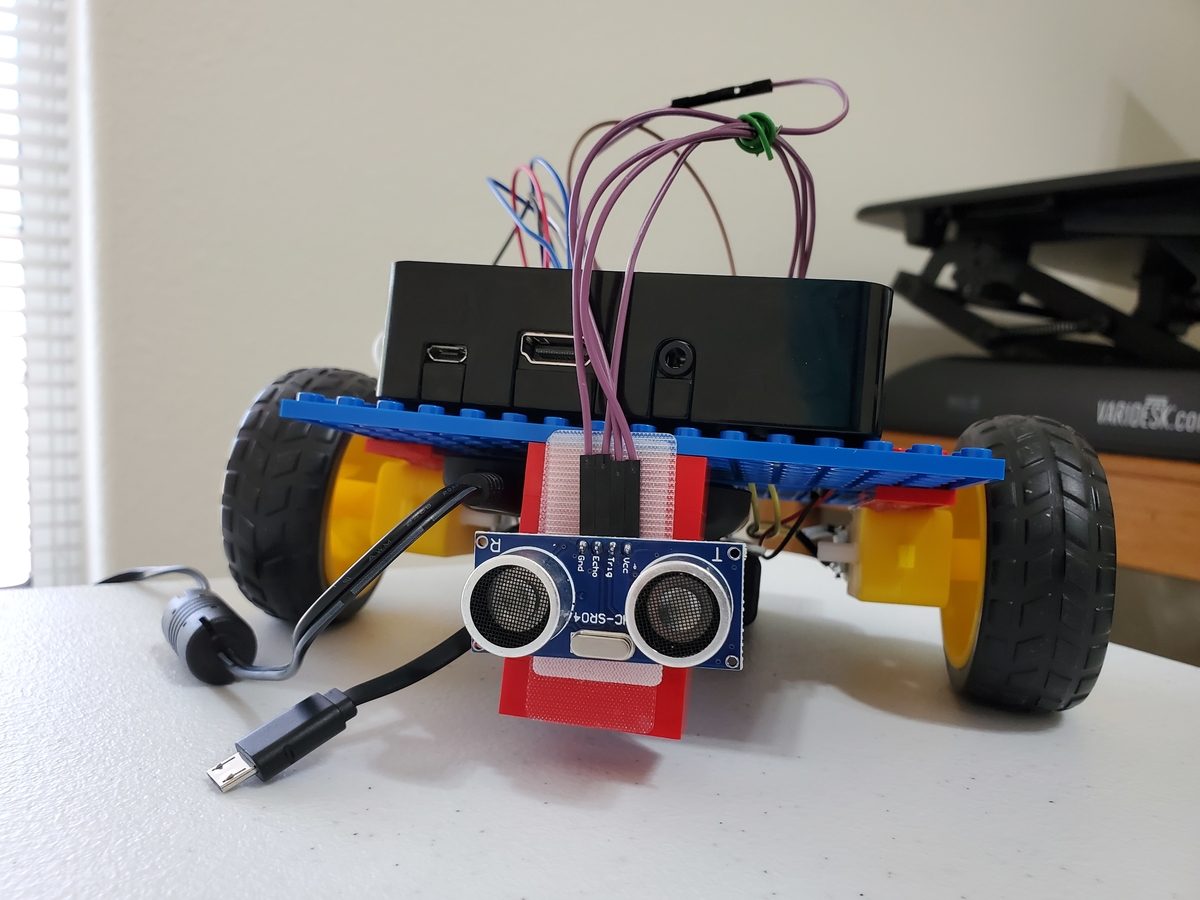
How to Make an Obstacle Avoiding Robot Using Raspberry Pi ...

Raspberry Pi robot DiddyBorg Autonomously following a Ball ...

GoPiGo Raspberry Pi Robot Line Follower Now Available!

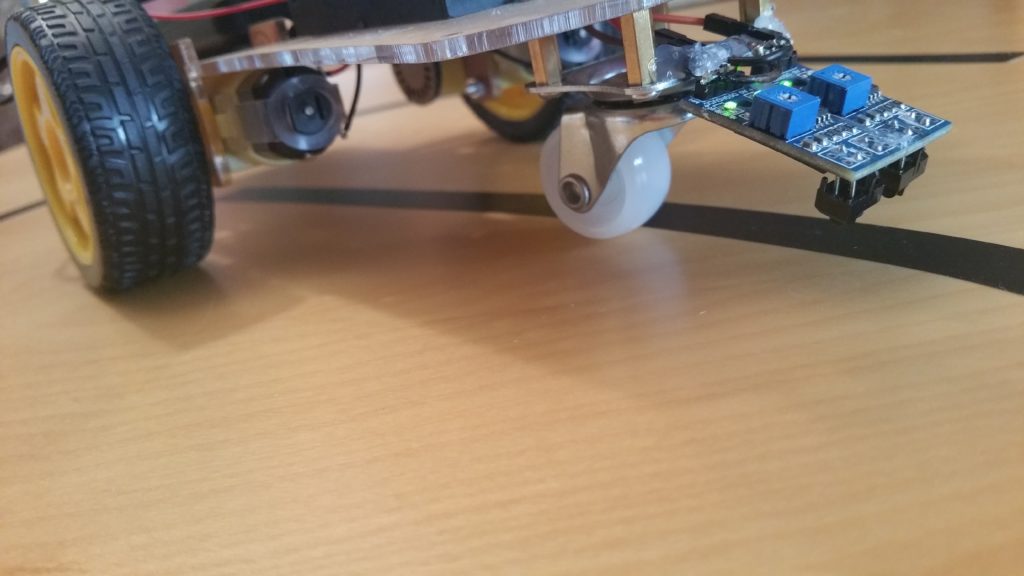
Build a line-following robot - Connect the line sensors ...
You can implement it by camera or IR. You will need: Wheeled Robot; Yellow Rubber Ball (available from eBay) Starting from the gesture, line follower and Path follower several Path estimation algorithms are developed for robotic movement. Then we need to check the IR sensor modules.
Luxury How To Make A Line Following Robot Using Raspberry Pi
Make sure you have already completed the build a buggy resource or that you have a working buggy before attempting this project. In this proposed system, Raspberry pi is connected with the USB camera where OpenCV is used for the line follow using the ROI which will help the robot to achieve more accuracy accordingly. Second, to illustrate the fact that any robot has some kind of computer embedded in its 'heart' to be able to take input, make a decision and produce an output. To do this, connect the IR modules to your Raspberry Pi as shown in the following diagram.
