How To Make A Robot That You Can Control
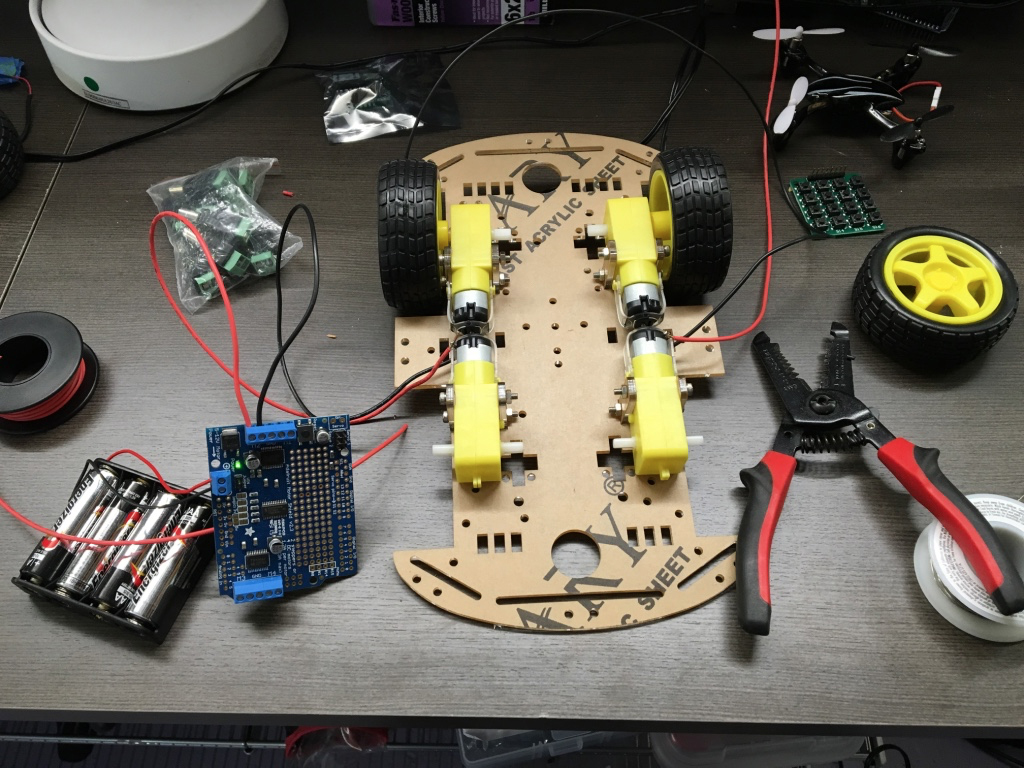
How To Make A Robot That You Can Control. For your first robot you should go with a simple design of just two servo motors on a flat piece of plastic. Build a ship to finish the track to become a master builder.

The robot control Python code below provides a good starting point in developing software to control a robot.
I tend to like the app better because I can see my notifications at the same time.

Make a Mind-Controlled Arduino Robot: Use Your Brain as a ...

Which Is The Best Remote Control Robot With Camera ...

How to make a robot that you can control. ROBLOX - YouTube

start here robot...(spaghetti head) | RobotShop Community

Playful Puppy Robot | Make:

Sharp release $1800 RoBoHon droid that is a walking robot ...

How to Use Makeblock for Scratch to Control Robot Arm ...
Using TensorFlow to allow a robot to identify objects ...

Robot Can Make Balloon Animals! - Super Cool Robots
You'll kind of figure it out most of the times which is great. Motors and actuators are the devices which make the robot movable. He uses a clever mix of parts from high-end hobbyist suppliers so that none of his.
Inspirational How To Make A Robot That You Can Control
There still is plenty of free program memory to add code for such tasks. The electronics part is plug-n-play, the robot chassis being what will take a little time. We have four switches on the transmitter section to power each motor for bidirectional motion. When you start studying how to make your own robots, you realize that you can actually assemble a robot in an hour or so and without having access to very advanced technology.
